robot end effector quick change
It functions to improve the accuracy of work. A box appears at the location of the Panda end effector.

Onrobot Launches Quick Changer The Industry S Lightest Most Compact Robotics Tool Changer Onrobot
Once built you can insert a tool module or give the Guardbuddy a gun.
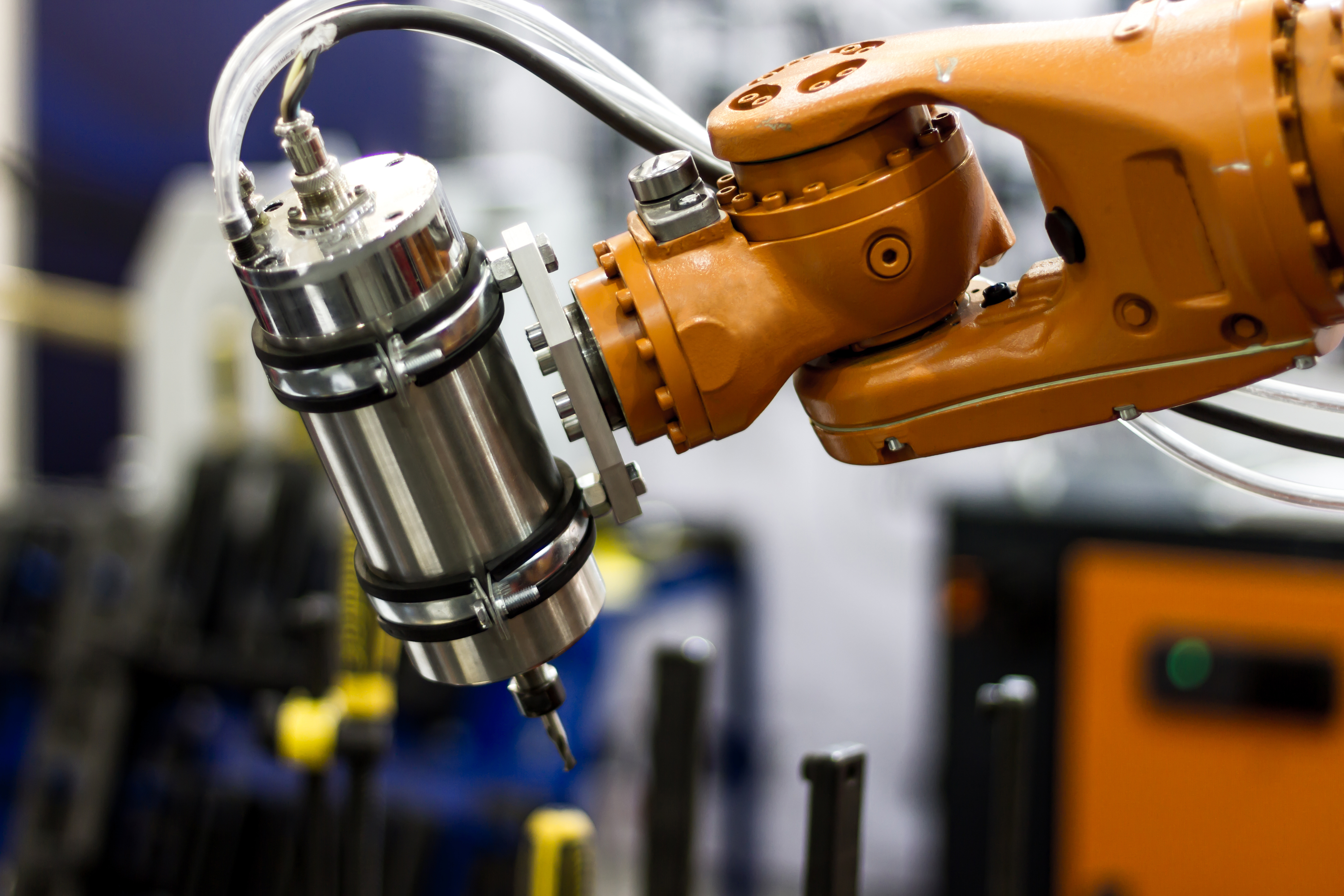
. In a functional industrial robot unit typically how many degrees of freedom would the robot have. Common examples of end effectors include welding devices such as MIG-welding guns spot-welders etc spray guns and also grinding and deburring devices such as pneumatic disk or belt grinders burrs etc and grippers devices that can grasp an object. There are certain types of this tooling and each one of them has different functions.
1 the end-effector position and orientation which. The robot plans a path to a pose goal. Robotic pick and pass Smart use of robotics on INSITEs auto case erectors enables us to get rid of many of the parts and.
Re-calibrate torque sensors New in release 120. In both situations the opposing-cup effector on INSITE Packaging Automations case erector takes care of business. The robot plans a Cartesian path.
The robot moves its arm back to a new pose goal while maintaining the end-effector level. Optionally you may use a pen on the mainboard to rename the finished robot. Gecko-inspired adhesives can help achieve grasping strength through the use of van der Waals forces 35Originally used for climbing applications where the objective is to sustain shear loads parallel to the surface under negative normal forces away from the surface 610 dry adhesives can also improve the gripping capability of hands while reducing the size.
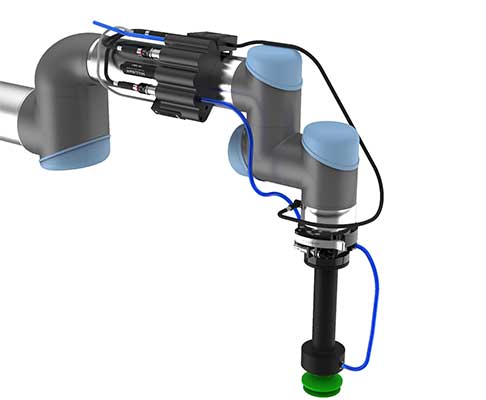
Vacuum end effectors are easy to configure from the modular system. The robot plans a Cartesian path. They are particularly suitable for processes in the packaging industry.
A quick change end effector system for use with a robot includes. Of a computer not connected to or directly controlled by a central system or not connected to. The robot moves its arm to a simple goal with no objects in the way.
Motor selection is the least understood concept for robotics hobbyists which require strategizing and serious analysisIt involves in determining robot speed acceleration torque requirements based on robot weight wheel size and application where it is to be implementedThere are many types of motors are available in todays market but mostly. One computational approach 30 to whole-body planning for soft planar manipulators considers both the primary task of advancing the pose of the end effector of the soft robot and the secondary. The robot executes the Cartesian path plan.
You may choose to change the code in the demo libraries. Most robot couplers use pneumatics to lock the Master- and Tool-sides together. To change the Guardbuddys tool module unlock the bot by poking it with a head-level ID one with superuser access then click on the bot with a tool module.
Over time it is possible that the torque sensors develop offsets in reporting absolute. End-effector An accessory device or tool specifically designed for attachment to the robot wrist or tool mounting plate to enable the robot to perform its intended task. An end-effector with two mating parts a Master-side and a Tool-side that have been designed to lock or couple together automatically carry a payload and have the ability to pass utilities such as electrical signals pneumatic water etc.
Executing Trajectories Adjusting Speed Clicking Plan Execute or Execute after a successful plan will send the trajectory to the robot - in this tutorial since you used demolaunch the robot is. The box changes colors to indicate that it is now attached. For example if we have a 2-link robotic arm there are two obvious ways to describe its current position.
The robot moves its arm to the joint goal at its side. The robot plans and moves its arm to the joint goal. If the Use Cartesian Path checkbox is activated the robot will attempt to move the end effector linearly in cartesian space.
Area grippers are universal and are used in a huge range of robot applications. The quick release is mechanically. Something that controls what you do by keeping you within particular limits.
The robot executes the Cartesian path plan. Basically a Jacobian defines the dynamic relationship between two different representations of a system. On the robot a servomotor in the hip orients the leg in the sagittal plane at a target perch or object and also balances the robots center of gravity during perching.
The robot displays the Cartesian path plan again. The second motor stores energy in a spring which is released upon impact with an object through a quick-release mechanism in the body. The 2019 International Conference on Robotics and Automation ICRA has been held on 20-24 May 2019 in Montreal Canada.
Jacobian matrices are a super useful tool and heavily used throughout robotics and control theory. The robot plans a path to a pose goal. The robot moves its arm along the desired Cartesian path a triangle down right upleft.
The user can move the robot by applying forcetorque to the end-effectorjoints. The robot plans and moves its arm to the joint goal. The box changes colors to indicate that it is now attached.
The robot displays the Cartesian path plan again. Its basic function is to improve the automation and speed of working of the robot. A box appears at the location of the Panda end effector.
5 Which of the following basic parts of a robot unit would comprise the computer circuitry that could be programmed to determine which of the following the robot would do. The end of arm tooling is the structure that helps the robots perform certain chores efficiently. Executing Trajectories Adjusting Speed Clicking Plan Execute or Execute after a successful plan will send the trajectory to the robot - in this tutorial since you used demolaunch the robot is.
Examples may include gripper spot-weld gun arc-weld gun spray-paint gun inspection camera adhesive dispenser or any other application tools. If the Use Cartesian Path checkbox is activated the robot will attempt to move the end effector linearly in cartesian space. When there is a Cartesianjoint position command the result motion will be a combination of both force and position commands.
When you run rtbdemo click Robot-Forward kinematics Everything works fine until Easy to find out that all subplots are plotting the x-t relationship. Motors Used in Industrial Robotics. The most essential robot peripheral is the end effector or end-of-arm-tooling EOT.
The ICRA 2019 is a flagship IEEE Robotics Automation Society conference and will feature a premiere international venue for international robotics researchers. A quick change end effector configured for application to a task to be completed by a robot the quick change end effector further. Area gripping systems and end effectors are gripping systems that can be attached directly on the robot.
2021 IEEE International Conference on Robotics and Automation ICRA May 30 - June 5 2021 Xian China All presentations at GMT1 Hrs. Add the robot arm.
The 5 Minute Guide To Use Any End Effector With Robodk Robodk Blog
End Of Arm Tooling Robot End Effectors Millibar Robotics

Magnetic Robot End Effector Top 5 Pros And Cons

Does Your Robot Need A Tool Changer Destaco

Why Ati Tool Changers Youtube

Robot Quick Changer End Of Arm Tooling Onrobot

Who Is Schaft The Robot Company Bought By Google And Winner Of The Drc Robot Design Robot Robotics Companies

What Is An End Effector And How Do You Use One Robodk Blog

Practical Use Of End Effectors Onrobot